
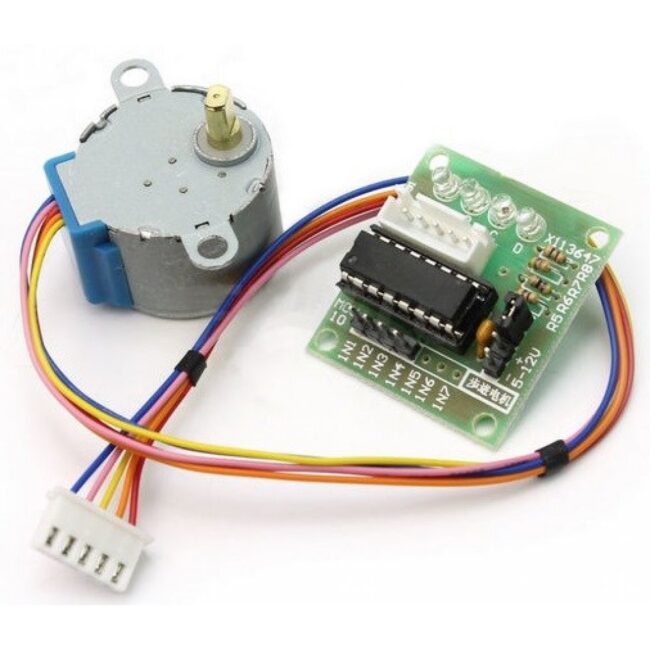
Гидроусилитель шагового двигателя
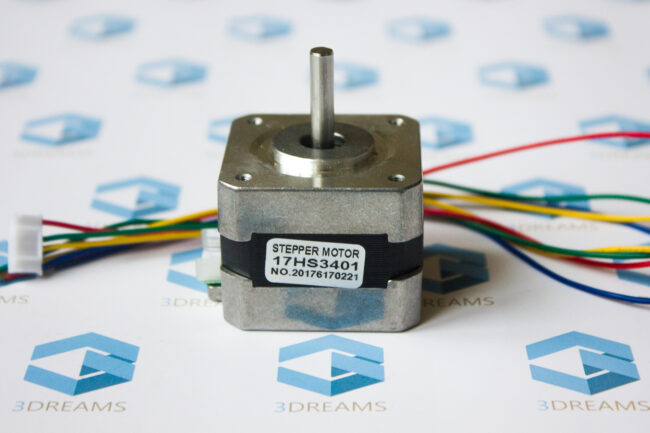
Шаговые двигатели (подробный разбор 4 типов)
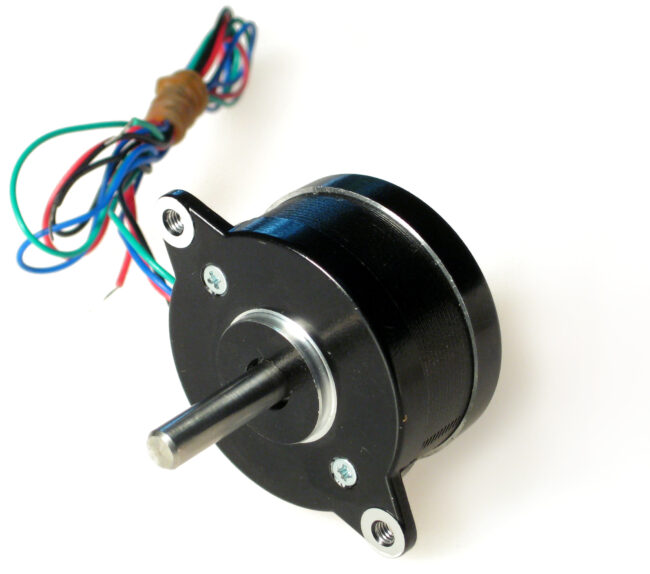
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
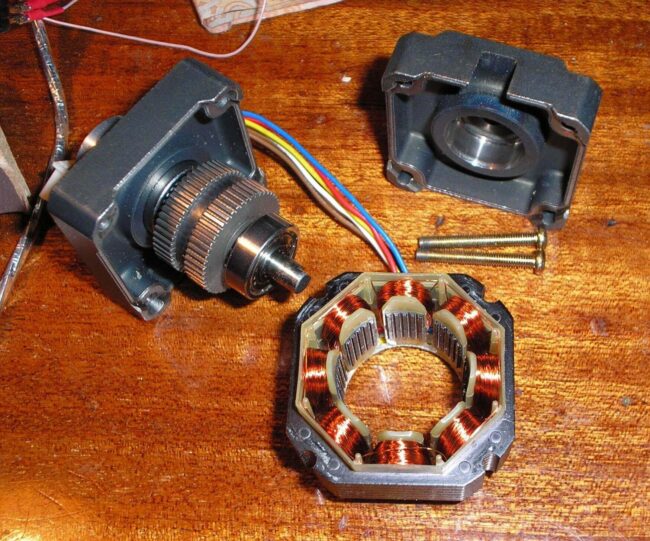
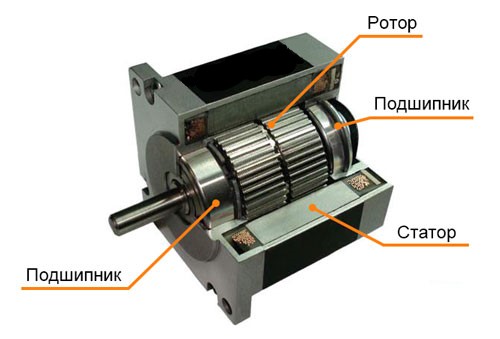
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

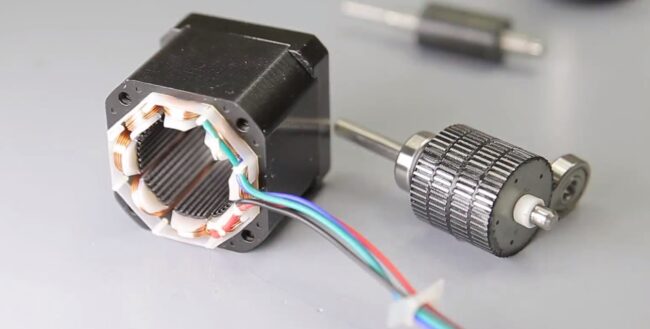
Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Устройство шагового двигателя: механизм его действия и назначение, где и как применяется
Шаговые двигатели постоянного тока очень часто используют при работе с установками с числовым программным руководством и робототехнике. Главная отличительная особенность такого вида двигателя – это то, как именно действует.
Суть в том, что его работа не непрерывна, а осуществляется пошагово со сменой установленного угла оборота на один шаг. Так образом рабочий элемент имеет конкретный угол поворота в определенный момент, что позволяет контролировать процесс.
Питание такого мотора делимое, совершаемое импульсно. Именно импульсы и обеспечивают поворот вала на какой-то установленный угол.
В основном такие двигатели функционируют совместно с редуктором, который делает установку на валу максимально четкой и с энкодером, который определяет положение вала в данное время. Все эти детали нам нужны для передачи и меняет угол вращения.
Сегодня мы хотим поделиться с вами своими знаниями о данном типе механизмов, о том, как он работает и зачем нужен.
Конструкция шагового двигателя

Если классифицировать данный тип мотора, то его мы отнесем к бесколлекторному синхронному мотору, в составе которого присутствуют статор и ротор.
Ротор имеет раздельные отсеки, состоящие из электротехнической стали, имеет «зубатую» структуру, а они разграничены постоянными магнитами. Статоре имеет специальные обмотки, которые схожи с катушками.
Как же это выглядит на деле?
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.

При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.
При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Обмотки бывают разные
В шаговых моторах используют биполярные или униполярные обмотки. Как это работает мы объясняли на примере биполярного устройства. Такой механизм предполагает применение отличных друг от друга фаз для снабжения обмоток.
Такая схема достаточно трудная, кроме того, для нее нужны сильные платы управления, которые стоят немалых денег.
Приборы с униполярными обмотками имеют более простой тип управления. Такие схемы имеют общий «плюс» подключения. На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
Каждый из этих типов имеет преимущества и недостатки. Биполярные шаговые моторы мощнее униполярных, их крутящий момент на сорок процентов превосходит униполярки, хотя вторые легче в управлении.
Типы двигателей по конструкции ротора
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много. Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей. Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.
Плюсы и минусы шаговых моторов
Смело запишем к преимуществам следующее:
- высокие скорости старта, тормоза и реверса;
- вал делает оборот в согласно команде главного устройства на указанный угол;
- точная фиксация позиции после тормоза;
- четкость установки позиции;
- максимальная надежность в связи с отсутствием коллектора;
- обеспечение наибольшего крутящего момента при низких скоростях.

- есть риск изменения позиции в случае перегрузки вала, которая превышает ПДК для шагового мотора;
- риск резонанса;
- трудности в управлении;
- низкая скорость оборотов, хотя это не совсем минус, так так ШД применяют не для обеспечения вращения, а для обеспечения определенных позиций элемента в конкретный момент.
Наш шаговый мотор имеет второе имя, которое дает максимальное описание устройства, а именно: «электродвигатель с конечным числом положений ротора». Их используют в новых устройствах, таких, как 3D-принтеры, роботы, станки.
Конкурентоспособной альтернативой для него есть сервопривод, хотя они оба имеют свою нишу использования, которая определяется случаем.
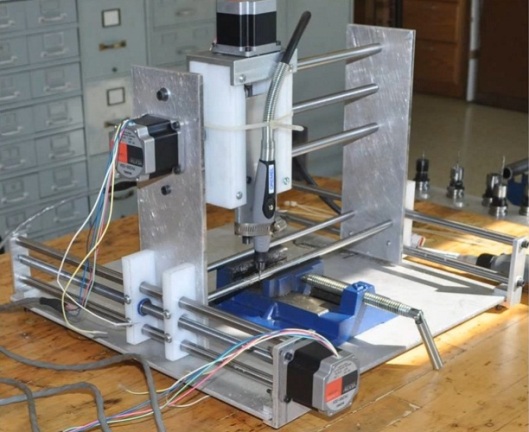
Подбор и расчет шаговых двигателей для ЧПУ
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с 2 , сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c 2 .
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Параметр | Модель | ||
|---|---|---|---|
| JKM Nema 17 42mm Hybrid Stepper Motor |
JK42HS48-2504 | JK42HS40-1704 | |
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Параметр | Модель | ||
|---|---|---|---|
| 86HS156-5004 | 57HS76-3004 | 42HS48-1704A | |
| Ток питания в фазе, А | 5 | 3 | 1.7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Двигатели от надежных производителей, эти же двигатели мы используем в наших станках.
- Всегда в наличии на складе.
- Комплексность: в нашем каталоге можно подобрать не только ШД, но и драйверы, датчики, соединительные муфты и другие комплектующие.
Получить консультацию по выбору шагового двигателя можно по телефону 8 (800) 350 33 60.
Сервопривод или шаговый двигатель: какова разница и что выбрать?

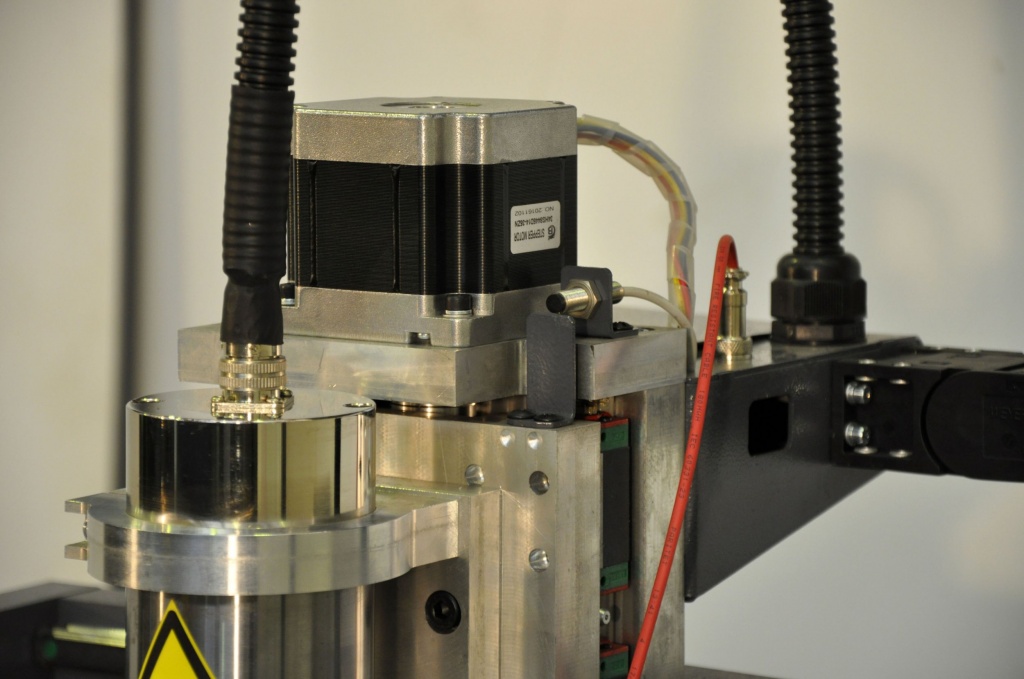
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.




Предприятие MULTICUT образовано в 2009 году с целью организации выпуска отечественных координатных установок с ЧПУ для решения различных производственных задач.
подробнее о производстве
Драйвер шагового двигателя — устройство, виды и возможности
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление. Именно этой для этой цели и служат контроллеры шаговых двигателей , обеспечивающие бесперебойную и точную работу электроприводов различного назначения.

Грубо принцип работы шагового двигателя можно описать так. Каждый полный оборот ротора шагового двигателя состоит из нескольких шагов. Подавляющее большинство шаговых двигателей рассчитаны на шаг в 1,8 градуса, и на полный оборот приходится 200 шагов. Привод меняет положение на шаг при подаче на определенную обмотку статора напряжения питания. Направление вращения зависит от направления тока в обмотке.
Следующий шаг — выключается первая обмотка, питание подается на вторую и так далее, в итоге после отработки каждой обмотки ротор совершит полный оборот. Но это грубое описание, на деле алгоритмы несколько сложнее, и об этом будет рассказано далее.
Алгоритмы управления шаговым двигателем
Управление шаговым двигателем может быть реализовано по одному из четырех основных алгоритмов: попеременное включение фаз, управление с перекрытием фаз, полушаговое управление или микрошаговое управление.
В первом случае в каждый момент времени питание получает только одна из фаз, и точки равновесия ротора двигателя на каждом шагу совпадают с ключевыми точками равновесия — полюса отчетливо выражены.
Управление с перекрытием фаз позволяет ротору получить шаги к позициям между полюсными выступами статора, что увеличивает вращающий момент на 40% по сравнению с управлением без перекрытия фаз. Угол шага сохраняется, однако положение фиксации смещено — оно находится между полюсными выступами статора. Эти первые два алгоритма применяются в электротехническом оборудовании, где очень высокая точность не требуется.
Полушаговое управление — комбинация первых двух алгоритмов: через шаг питание получают то одна фаза (обмотка), то две. Размер шага уменьшается вдвое, точность позиционирования получается более высокой, снижается вероятность наступления механического резонанса в двигателе.
Наконец, микрошаговый режим. Здесь ток в фазах меняется по величине так, чтобы положение фиксации ротора на шаг приходилось бы на точку между полюсами, причем, в зависимости от соотношения величин токов в одновременно включенных фазах, таких шагов можно получить несколько. Регулируя соотношение токов, настраивая количество рабочих соотношений, получают микрошаги — наиболее точное позиционирование ротора.
Драйвер шагового двигателя
Чтобы выбранный алгоритм реализовать практически, применяют драйвер шагового двигателя . Драйвер содержит в себе силовую часть и контроллер.
Силовая часть драйвера — это полупроводниковый усилитель мощности, задача которого преобразовать подаваемые на фазы импульсы тока в перемещения ротора: один импульс — один точный шаг или микрошаг.
Направление и величина тока — направление и величина шага. То есть задача силовой части — подать ток определенной величины и направления в соответствующую обмотку статора, удержать этот ток в течение некоторого времени, а также осуществлять быстрое включение и выключение токов, чтобы скоростные и мощностные характеристики привода соответствовали бы поставленной задаче.
Чем более совершенна силовая часть драйвера, тем больший момент можно получить на валу. Вообще, тренд прогресса в совершенствовании шаговых двигателей и их драйверов — получить от двигателей малых габаритов значительный рабочий момент, высокую точность, и сохранить при этом высокий КПД.
Контроллер шагового двигателя
Контроллер шагового двигателя — интеллектуальная часть системы, которая обычно изготовлена на базе микроконтроллера с возможностью перепрограммирования. Именно контроллер отвечает за то, в какой момент, на какую обмотку, на какое время, и какой величины ток будет подан. Контроллер управляет работой силовой части драйвера.
Продвинутые контроллеры подключаются к ПК, и могут регулироваться в режиме реального времени при помощи ПК. Возможность многократного перепрограммирования микроконтроллера избавляет пользователя от необходимости каждый раз при корректировке задачи приобретать новый контроллер — достаточно перенастроить уже имеющийся, в этом гибкость, контроллер можно легко переориентировать программно на выполнение новых функций.
На рынке сегодня представлены широкие модельные ряды контроллеров шаговых двигателей от различных производителей, отличающиеся возможностями расширения функций. Программируемые контроллеры предполагают запись программы, а некоторые включают в себя программируемые логические блоки, при помощи которых возможна гибкая настройка алгоритма управления шаговым двигателем под тот или иной технологический процесс.
Управление шаговым двигателем при помощи контроллера позволяет достичь высокой точности вплоть до 20000 микрошагов на оборот. Причем управление может осуществляться как напрямую с компьютера, так и за счет прошитой в устройство программы или по программе с карты памяти. Если параметры в ходе выполнения задачи меняются, то компьютер может опрашивать датчики, отслеживать меняющиеся параметры и оперативно изменять режим работы шагового двигателя.
Есть в продаже блоки управления шаговым двигателем, к которым подключаются: источник тока, кнопки управления, источник тактового сигнала, потенциометр для настройки шага и т. д. Такие блоки позволяют быстро интегрировать шаговый двигатель в оборудование для выполнения повторяющихся цикличных задач с ручным или автоматическим управлением. Возможность синхронизации с внешними устройствами и поддержка автоматического включения, выключения и управления — несомненное достоинство блока управления шаговым двигателем.
Блок может управляться с компьютера напрямую, если, например, требуется воспроизвести программу для станка с ЧПУ, или в ручном режиме без дополнительного внешнего управления, то есть автономно, когда направление вращения вала шагового двигателя устанавливается датчиком реверса, а скорость регулируется потенциометром. Блок управления подбирается по параметрам к шаговому двигателю, который предполагается использовать.
В зависимости от характера поставленной цели выбирают способ управления шаговым двигателем. Если необходимо настроить простое управление маломощным электроприводом, когда в каждый момент времени один импульс подается на одну катушку статора: на полный оборот нужно, скажем, 48 шагов, и ротор будет перемещаться на 7,5 градусов при каждом шаге. Режим одиночных импульсов в этом случае подойдет.
Для достижения более высокого вращающего момента применяют двойной импульс — в две соседние катушки подается одновременно по импульсу. И если для полного оборота нужно 48 шагов, то опять же нужно 48 таких двойных импульсов, каждый приведет к шагу в 7,5 градусов но с на 40% большим моментом нежели в режиме одиночных импульсов. Скомбинировав оба способа можно получить 96 импульсов разделив шаги — получится 3,75 градуса на шаг — это комбинированный режим управления (полушаговый).
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!



